핵심 요약
VGGT-SLAM은 VGGT가 만든 local submap을 긴 RGB monocular sequence에 맞게 이어 붙이기 위해, Sim(3)이 아니라 SL(4) homography를 factor graph에서 최적화하는 dense RGB SLAM 시스템이다.
VGGT-SLAM의 핵심은 VGGT submap 사이의 불일치를 단순 scale/rotation/translation 문제가 아니라 uncalibrated camera에서 생기는 projective ambiguity로 보고, 이를 SL(4) factor graph로 푸는 것이다.
VGGT Submaps
GPU memory 한계 때문에 긴 sequence를 여러 VGGT submap으로 나눠 생성.
Projective Ambiguity
uncalibrated reconstruction은 일반적으로 15-DOF projective transform까지 모호할 수 있음을 SLAM 정렬 문제로 연결.
SL(4) Factor Graph
relative homography와 loop closure를 SL(4) manifold 위에서 전역 최적화.
Uncalibrated RGB SLAM
camera intrinsics나 consistent calibration 없이 monocular RGB로 dense mapping 수행.
이 논문은 VGGT를 SLAM에 붙이는 단순 engineering이 아니다. feed-forward reconstruction의 실패 형태를 classical projective geometry 언어로 해석하고, 그 해석에 맞는 manifold optimization을 설계한 점이 핵심이다.
짧은 batch에 강함
dense reconstruction quality는 높지만, 긴 video는 GPU memory 한계로 한 번에 처리하기 어려움.
때로는 부족함
translation, rotation, scale만 맞추면 projective distortion이 남을 수 있음.
projective까지 보정
15-DOF homography로 shear, stretch, perspective ambiguity까지 다룸.
논문 상세 정리
아래부터는 기존 논문 내용을 최대한 담은 상세 해석이다. 핵심 흐름에서 벗어나는 배경지식, notation, 부가 자료는 접어두었다.
Problem: VGGT를 왜 긴 RGB SLAM으로 확장하나
초록은 VGGT-SLAM을 uncalibrated monocular RGB camera만으로 dense SLAM을 수행하는 시스템으로 제시한다. VGGT가 만든 submap들을 incremental/global하게 align하되, 단순 Sim(3)이 아니라 projective ambiguity를 고려한 SL(4) 최적화를 사용한다.
VGGT의 강한 dense prior를 긴 sequence로 확장하려면, submap fusion의 geometry를 다시 봐야 한다.
| 문제 | 논문의 해석 | 해결책 |
|---|---|---|
| VGGT memory limit | 긴 video를 한 번에 처리하기 어려움 | submap 단위로 나누고 전역 정렬 |
| Uncalibrated input | metric reconstruction이 아니라 projective ambiguity가 남을 수 있음 | SL(4) homography alignment |
| Long sequence drift | sequential factor만으로는 누적 오차 발생 | SALAD 기반 loop closure 추가 |
Context: feed-forward submap은 어디서 길이 한계가 생기나
Introduction은 VGGT가 많은 view를 한 번에 처리하기 어렵다는 현실적 한계에서 출발한다. 단순히 overlapping frame을 공유하는 submap들을 만들고 Sim(3)로 붙이면 충분해 보이지만, 논문은 uncalibrated camera의 경우 reconstruction이 projective transform까지 모호할 수 있음을 지적한다.
핵심은 “VGGT를 크게 돌릴 수 없으니 나눠서 돌리자”에서 끝나지 않는다는 점이다.
| 단계 | 직관적 생각 | 논문의 반박 |
|---|---|---|
| Submap split | VGGT를 여러 window로 실행 | 각 submap의 coordinate ambiguity가 달라질 수 있음 |
| Overlap frame | 공유 frame으로 대응점 확보 | 대응점은 충분해도 transform group 선택이 문제 |
| Sim(3) | scale/rotation/translation만 맞추면 됨 | uncalibrated reconstruction에서는 shear/perspective도 필요할 수 있음 |
Gap: local reconstruction과 global SLAM 사이에 무엇이 비어 있나
Related Work는 classical scene reconstruction, feed-forward scene reconstruction, MASt3R-SLAM, SL group optimization으로 나뉜다. VGGT-SLAM은 feed-forward dense prior를 쓰면서도, backend는 classical projective geometry와 Lie group optimization으로 설계한다.
Related Work 흐름 보기
비슷한 SLAM 시스템과 비교할 때, transform group이 무엇인지가 가장 중요한 차별점이다.
feature, matching, BA, SE(3)/Sim(3) backend 중심.
DUSt3R, MASt3R, VGGT처럼 dense point/depth를 직접 예측.
uncalibrated dense monocular SLAM이지만 Sim(3) alignment 중심.
SL(3)는 image homography에 흔하지만, SL(4) factor graph SLAM은 새로움.
문헌 흐름은 dense prior를 쓰더라도 backend 좌표계와 transformation group을 어떻게 잡을지가 핵심임을 보여준다.
| 비교 축 | 기존 접근 | VGGT-SLAM의 선택 |
|---|---|---|
| Geometry source | feature matching 또는 dense pair prediction | VGGT dense prior를 frame-level constraint로 사용 |
| Alignment group | SE(3), Sim(3), homography 기반 정렬 | SL(4) projective transform으로 dense prediction 정렬 |
| Backend | pose graph / BA / dense alignment | projective factor graph로 prior와 SLAM state 결합 |
| 차별점 | feed-forward result를 후처리로 쓰는 경우가 많음 | prediction 자체를 factor graph objective에 끼워 넣음 |
Mechanism: SL(4) submap graph로 어떻게 정렬하나
Method는 keyframe selection, local submap generation, relative homography estimation, loop closure, SL(4) backend로 이어진다. VGGT에서는 dense depth와 confidence를 사용하고, point cloud는 depth와 camera head를 inverse projection해 만든다.
submap을 만드는 단계와 submap을 붙이는 단계가 분리되어 있고, 붙이는 단계에서 SL(4)가 등장한다.
| 구성 | 담당 | 읽는 포인트 |
|---|---|---|
| Keyframe selection | Lucas-Kanade disparity가 threshold보다 클 때 keyframe 선택 | 충분한 parallax가 depth/reconstruction 안정성에 중요 |
| Submap input | Ilatest = {Mprior} ∪ Ilatest ∪ Iloop | 이전 submap frame과 loop frame을 함께 넣음 |
| Relative homography | overlap frame의 dense correspondence로 Hij ∈ SL(4) 추정 | 별도 correspondence estimation이 필요 없음 |
| Loop closure | SALAD descriptor로 이전 keyframe retrieval | non-sequential homography factor 추가 |
| Backend | absolute homography를 SL(4) manifold에서 MAP 최적화 | submap들을 global reconstruction으로 정렬 |
Mechanism: SL(4) objective와 homography는 어떻게 쓰이나
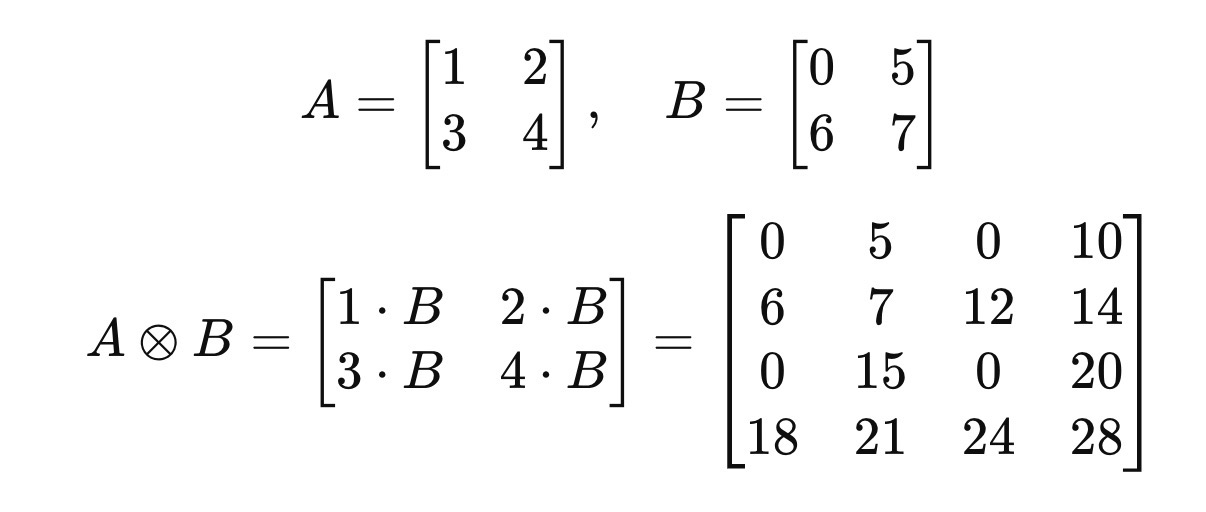
수식은 relative homography 관계, closed-form homography estimation, SL(4) factor graph objective, tangent-space linearization으로 읽으면 된다. 핵심 수식은 먼저 펼쳐두고, 보조 번호 수식은 보조 수식 정리에서 이어서 확인할 수 있게 했다.
왜 SL(4)인지 이해하려면 각 group이 표현하는 ambiguity 범위를 비교하면 된다.
| Group | DOF | 다루는 변환 | 한계/역할 |
|---|---|---|---|
| SE(3) | 6 | rotation + translation | metric scale이 맞는 rigid alignment |
| Sim(3) | 7 | SE(3) + scale | monocular scale drift 보정에는 적합 |
| SL(4) | 15 | 3D projective homography | uncalibrated projective ambiguity까지 보정 |
Homography / tangent update 보조 수식 보기
Homography / tangent update 보조 수식
Core Equations에서 크게 묶었던 homography estimation과 tangent-space update를 번호 흐름에 맞춰 이어서 정리한다.
Evidence: pose/dense map/loop closure를 어떻게 검증했나
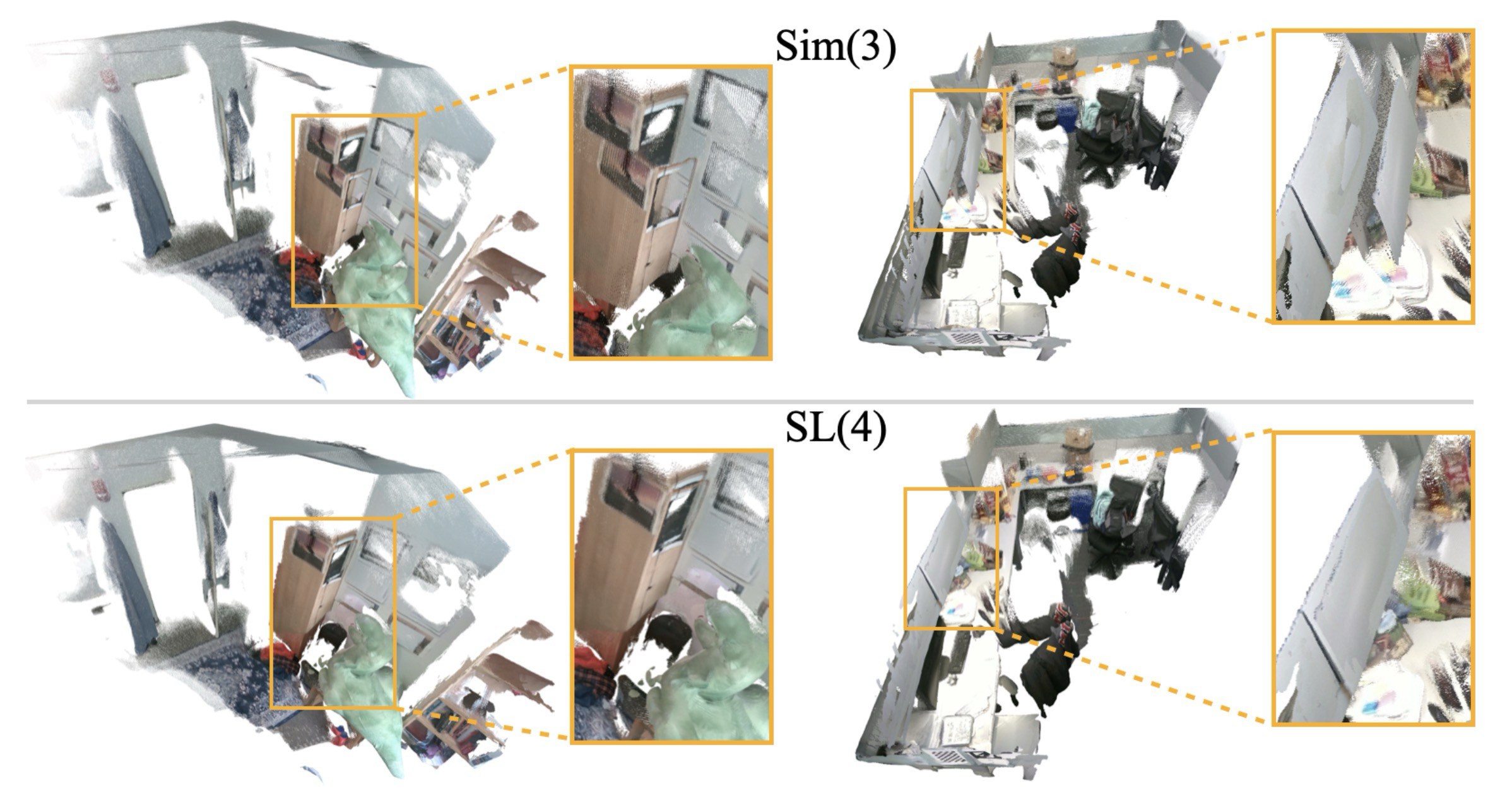
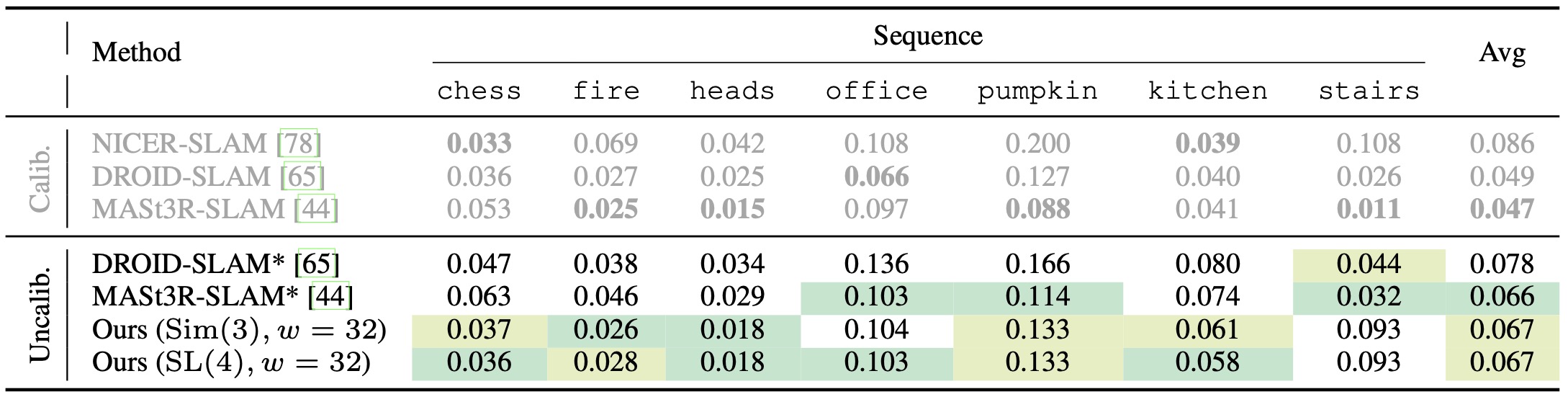
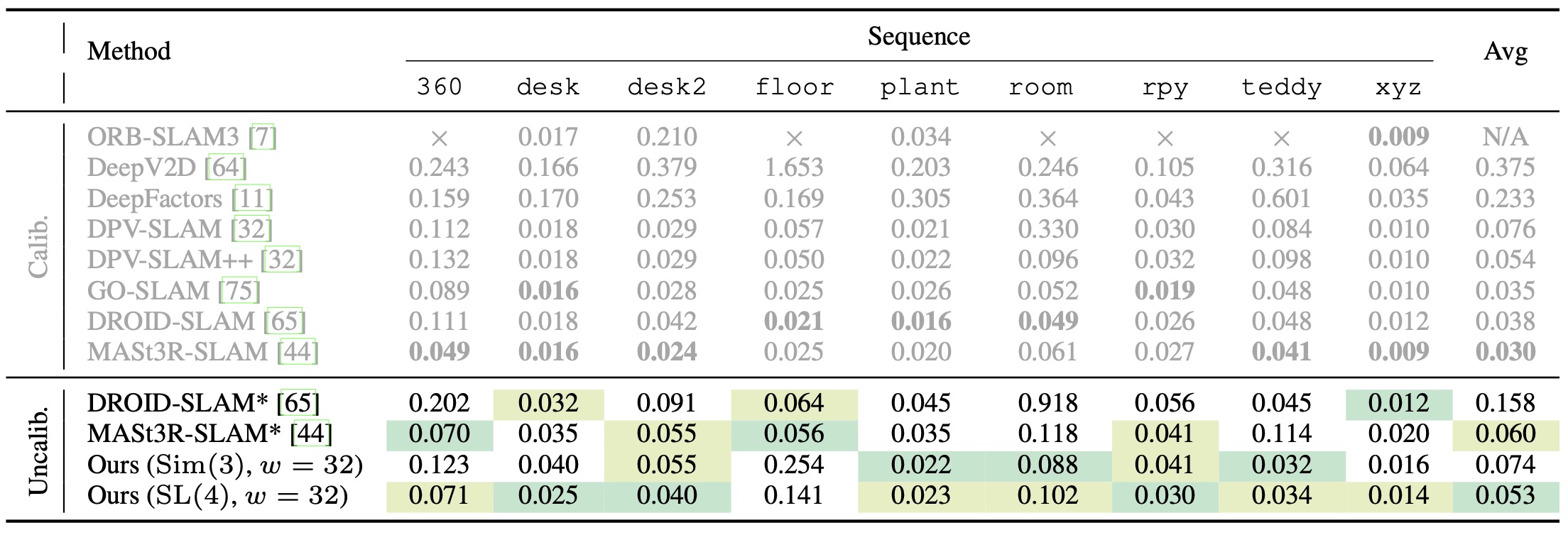
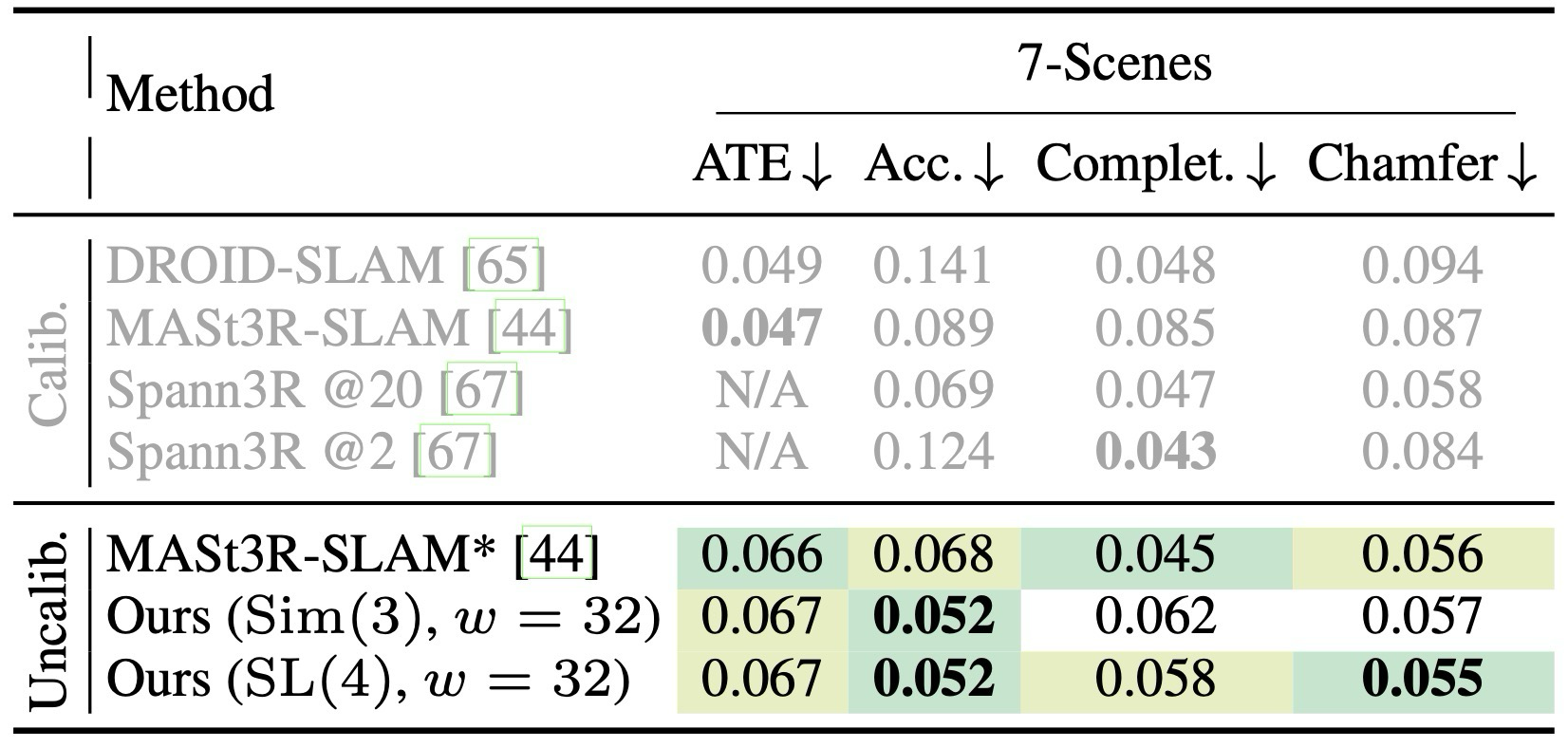
실험은 pose estimation, dense reconstruction, qualitative map, ablation으로 구성된다. 핵심 결과는 SL(4)가 일부 어려운 장면에서 Sim(3)보다 유리하고, 전반적으로 uncalibrated setting에서 MASt3R-SLAM 수준 또는 그 이상으로 경쟁력 있다는 점이다.
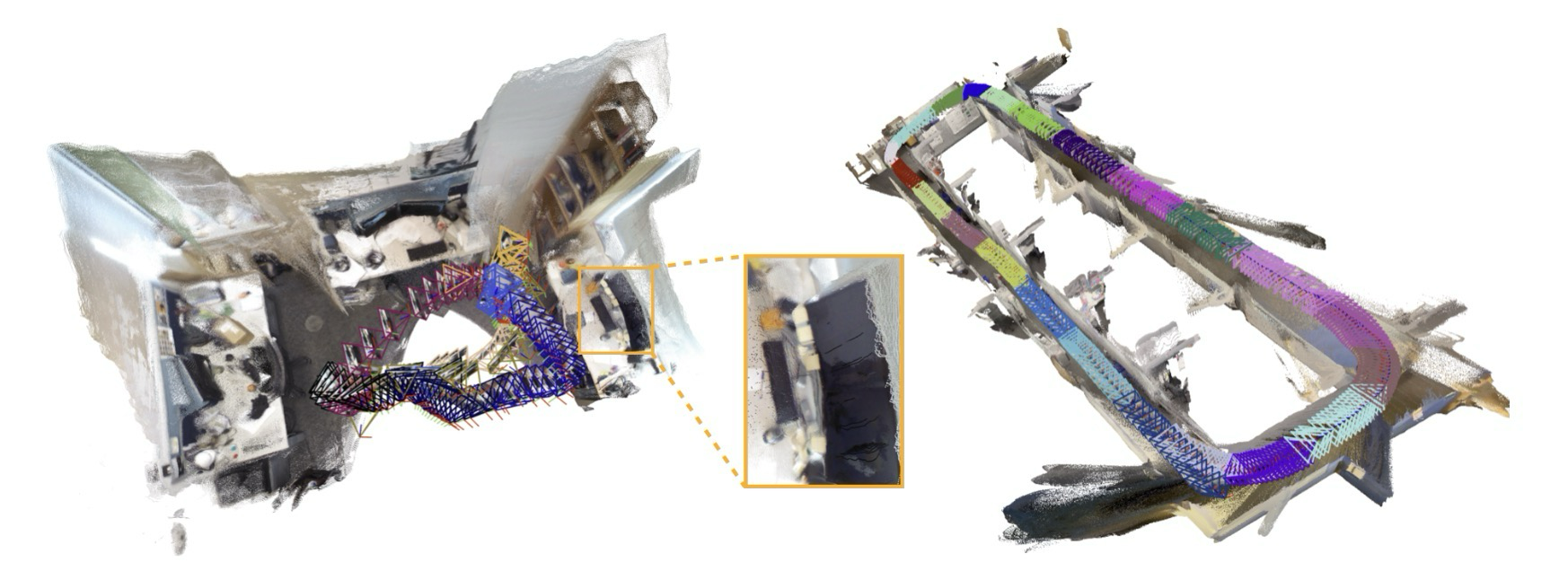
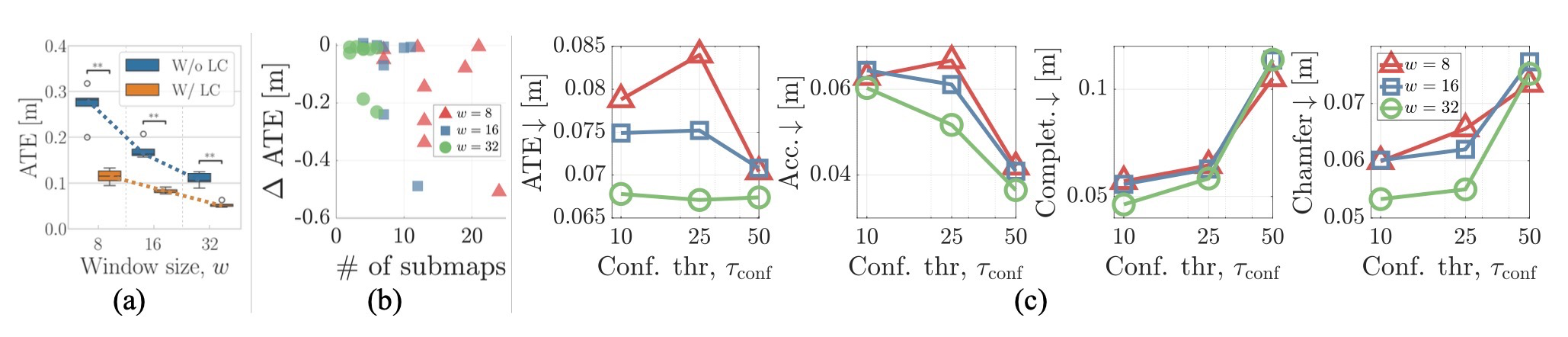
Table 1/2는 pose, Table 3은 dense map quality, Fig. 3은 loop closure와 confidence threshold ablation을 보여준다.
MASt3R-SLAM*와 비슷한 평균 ATE, uncalibrated dense SLAM 경쟁력 확인.
SL(4), w=32가 uncalibrated 평균 error에서 가장 좋은 결과.
7-Scenes에서 accuracy와 Chamfer가 우수.
office/corridor loop에서 여러 submap을 global map으로 연결.
submap 수가 늘수록 loop closure의 error reduction 효과 증가.
planar scene degeneracy, outlier homography, 15-DOF drift 가능성.
Usage / Limits: planar degeneracy와 outlier 조건에서 무엇을 조심하나
원문 limitations는 planar point에서 15-DOF homography estimation이 degeneracy를 일으킬 수 있고, VGGT point outlier에 취약하다는 점을 강조한다. 따라서 depth error에 더 강한 ray-based matching, Sim(3)로 충분한 조건과 SL(4)가 필요한 조건의 판별, 두 optimization을 함께 쓰는 real-time unified system이 남은 과제다.
느낀점
(진행중...)
Problem: why extend VGGT into long RGB SLAM?
VGGT-SLAM is presented as a dense RGB SLAM system for uncalibrated monocular cameras. It incrementally and globally aligns VGGT submaps, but uses SL(4) optimization rather than only Sim(3) because projective ambiguity can remain.
To scale VGGT's dense prior to long sequences, submap fusion geometry must be reconsidered.
| Problem | Interpretation | Solution |
|---|---|---|
| VGGT memory limit | Long videos are hard to process in one inference. | Split into submaps and globally align them. |
| Uncalibrated input | Projective ambiguity may remain beyond metric reconstruction. | SL(4) homography alignment. |
| Long-sequence drift | Sequential factors alone accumulate error. | Add SALAD-based loop closures. |
Context: where feed-forward submaps hit length limits
The introduction starts from a practical limit: VGGT cannot process very long videos in one shot. Splitting a sequence into overlapping submaps sounds natural, but the paper argues that uncalibrated cameras can leave projective ambiguity that Sim(3) cannot fully resolve.
The paper does not stop at “run VGGT in windows”; the alignment group is the real question.
| Step | Naive intuition | Paper's correction |
|---|---|---|
| Submap split | Run VGGT over multiple windows. | Each submap may carry a different coordinate ambiguity. |
| Overlap frame | Shared frames give correspondences. | Correspondences are not enough; the transform group matters. |
| Sim(3) | Scale, rotation, and translation should suffice. | Uncalibrated reconstruction may need shear and perspective correction. |
Gap: what is missing between local reconstruction and global SLAM?
The related work connects classical scene reconstruction, feed-forward scene reconstruction, MASt3R-SLAM, and SL group optimization. VGGT-SLAM uses a feed-forward dense prior, but its backend is driven by classical projective geometry and Lie-group optimization.
Related Work Details
Compared with similar SLAM systems, the transform group is the key difference.
Feature, matching, BA, and SE(3)/Sim(3)-style backends.
DUSt3R, MASt3R, and VGGT directly predict dense point/depth outputs.
Uncalibrated dense monocular SLAM with Sim(3)-centered alignment.
SL(3) appears in image homography, but SL(4) factor-graph SLAM is new here.
The literature shows that once a dense prior is available, the central backend question becomes which coordinate and transformation model should align it.
| Axis | Prior approach | VGGT-SLAM choice |
|---|---|---|
| Geometry source | Feature matching or dense pair prediction. | Uses VGGT dense priors as frame-level constraints. |
| Alignment group | SE(3), Sim(3), or homography-style alignment. | Uses SL(4) projective transforms for dense predictions. |
| Backend | Pose graph, BA, or dense alignment. | Combines priors and SLAM states in a projective factor graph. |
| Difference | Feed-forward output is often treated as post-processing. | Places the prediction directly inside the factor-graph objective. |
Mechanism: how SL(4) submaps are aligned in a graph
The method proceeds through keyframe selection, local submap generation, relative homography estimation, loop closure, and an SL(4) backend. It uses VGGT depth and confidence, then inverse-projects depth with camera outputs to form dense point clouds.
Submap creation and submap alignment are separate; SL(4) enters at the alignment stage.
| Component | Role | Reading point |
|---|---|---|
| Keyframe selection | Selects keyframes when Lucas-Kanade disparity passes a threshold. | Parallax stabilizes depth and reconstruction. |
| Submap input | Ilatest = {Mprior} ∪ Ilatest ∪ Iloop | Includes previous and loop-closure frames. |
| Relative homography | Estimates Hij ∈ SL(4) from dense overlap correspondences. | No separate correspondence estimation is needed. |
| Loop closure | Retrieves prior keyframes with SALAD descriptors. | Adds non-sequential homography factors. |
| Backend | Optimizes absolute homographies on the SL(4) manifold. | Aligns submaps into a global reconstruction. |
Mechanism: how the SL(4) objective and homography are used
The equations cover relative homography alignment, closed-form homography estimation, the SL(4) factor-graph objective, and tangent-space linearization. Core equations are kept visible first, and the auxiliary numbered equations are kept in the supporting-equation section.
Compare the ambiguity each group can express to understand why SL(4) appears.
| Group | DOF | Transform | Role |
|---|---|---|---|
| SE(3) | 6 | Rotation + translation. | Rigid alignment when metric scale is fixed. |
| Sim(3) | 7 | SE(3) + scale. | Good for monocular scale drift. |
| SL(4) | 15 | 3D projective homography. | Can correct uncalibrated projective ambiguity. |
Homography / tangent update support formulas
Homography / tangent update support formulas
This section separates the homography-estimation and tangent-space update equations that were summarized in the Core Equations section.
Evidence: how pose, dense map, and loop closure are tested
The experiments cover pose estimation, dense reconstruction, qualitative maps, and ablations. The main result is that SL(4) is helpful in difficult cases while remaining competitive overall in uncalibrated SLAM.
Tables 1/2 evaluate pose, Table 3 evaluates dense map quality, and Fig. 3 studies loop closure and confidence threshold effects.
Competitive with MASt3R-SLAM* in uncalibrated average ATE.
SL(4), w=32 obtains the best uncalibrated average error.
Strong accuracy and Chamfer on 7-Scenes.
Joins multiple submaps into global office/corridor reconstructions.
Loop closure becomes more useful as the number of submaps grows.
Planar degeneracy, outlier homographies, and possible 15-DOF drift remain.
Usage / Limits: what to watch under planar degeneracy and outliers
The paper highlights planar degeneracy in 15-DOF homography estimation and sensitivity to VGGT point outliers. Remaining directions include ray-based matching for depth-error-robust homography estimation, automatic criteria for when Sim(3) is sufficient versus when SL(4) is needed, and a unified real-time system that can use both.
Takeaway
(In progress...)
Comments